Table of Contents
Cenni sulla teoria delle vibrazioni meccaniche Intendiamo dare qui solo una indicazione di massima con l’intento di inquadrare il problema e di fornire i mezzi atti a risolvere i casi più semplici.
Si tenga presente che nella quasi totalità dei casi per una corretta soluzione, è necessaria l’esperienza di uno specialista.
la comprensione di vari aspetti della teoria delle vibrazioni consente di scegliere i metodi corretti per ridurre le vibrazioni, ad esempio utilizzando vari antivibranti.
Per interventi di un certo impegno consigliamo pertanto di consultare la nostra guida sulla vibrazioni:
LE VIBRAZIONI
Si definisce vibrazione una grandezza che oscilla intorno ad un valore di riferimento.
Nel caso delle vibrazioni meccaniche la grandezza oscillante è una forza o lo spostamento da essa provocato.
Una vibrazione meccanica è caratterizzata da:
- AMPIEZZA, cioè variazione massima in rapporto al valore di riferimento.
- FREQUENZA, cioè numero di cicli (o oscillazioni) compiuti nell’unità di tempo (cicli/1″ o Hz).
L’inverso della frequenza è il periodo.
Le frequenze di interesse pratico nel campo delle vibrazioni meccaniche vanno da frazioni a qualche centinaio di Hz.
Anziché all’ampiezza si può fare riferimento alla velocità o alla accelerazione.
MOTO ARMONICO DI UNA MASSA
Ogni sistema meccanico comprendente un elemento elastico deve essere esaminato dal punto di vista oscillatorio.
Il più semplice sistema oscillatorio è costituito da una massa M e da una molla di rigidità K (vedi figura 1, sistema oscillante ad un solo grado di libertà, senza smorzamento).

Se in questo sistema statico si applica alla massa M una forza F, spostando il baricentro della massa stessa di una quantità Y, e si lascia libero il sistema, questo comincia a vibrare con moto sinusoidale di ampiezza costante e di frequenza f0.

La frequenza così determinata è la frequenza propria, cioè quella con la quale il sistema considerato oscilla in assenza di forze esterne.
La formula è valida per qualunque orientamento nello spazio.
Nel caso particolare di oscillazioni verticali si ha:

L’andamento di questa equazione è riportato in figura 2, dove si determina direttamente la frequenza propria (fo) di un sistema oscillante verticalmente in funzione del cedimento dei supporti o del valore di sottotangente (y0).
SOTTOTANGENTE
(y0)
Non sempre il cedimento reale [mm] equivale al valore della sottotangente nei tasselli elastici.
Infatti nelle molle metalliche, la cui caratteristica carichi cedimenti è lineare, il valore della sottotangente si identifica con il cedimento della molla.

Nei supporti elastici è un cedimento statico equivalente che si definisce graficamente come indicato in figura 3.

OSCILLAZIONI SMORZATE
In ogni sistema reale, bisogna tener conto delle resistenze passive.
Schematizzando le resistenze passive con uno smorzatore di tipo viscoso, dal sistema di figura I si ottiene il sistema di figura 4.

Smorzamento viscoso significa che la forza resistente Fr è proporzionale alla velocità del moto:

dove il coefficiente di proporzionalità c è detto coefficiente di smorzamento.
Se
Fr è espresso in [N], y in [mm] e t in [sec], c deve essere espresso in [N sec/mm].
In funzione del valore del coefficiente di smorzamento c e dei valori di K e M, si possono avere due tipi di moto:
- aperiodico, cioè con ritorno asintotico della massa M alla posizione di equilibrio originaria oscillante smorzato, cioè con oscillazioni della massa di ampiezza progressivamente decrescente.
Si ha moto aperiodico quando

Si ha moto oscillante smorzato quando

Lo smorzamento per cui

è definito critico:

Le unità di misura sono quelle indicate precedentemente e cioè: c è espresso in [N sec/mm], K in [N/mm], M in [N J sec2/mm].
Nella maggior parte delle applicazioni pratiche il moto è oscillante smorzato.
In questo caso i parametri caratterizzanti il moto sono:
modulo di smorzamento

decremento logaritmico

(Yn= ampiezza dell’ennesima oscillazione)
numero di smorzamento o smorzamento relativo

In fig. 5 è riportato il grafico per la determinazione approssimata di n in base al numero di cicli necessari perché l’oscillazione si arresti:

Nel caso di oscillazioni smorzate la frequenza propria del sistema diventa

è spesso trascurabile. L’errore che si commette non considerandolo è pari a

L’equazione che esprime la legge del moto è:
y=y0e−δtcos(fpt+ϑ) [mm]
dove
- t= tempo [sec]
- ωp= pulsazione propria del sistema (corrispondente af fp) [rad/sec]
- y0= ampiezza iniziale [mm]
- ϑ= fase iniziale [rad]
OSCILLAZIONI FORZATE
Se al sistema precedente sovrapponiamo una forza perturbatrice sinusoidale F=P0 sin Ot, dove F e P0 sono espressi in [N], con pulsazione Ω in [rad], a regime avremo:

dove lo sfasamento

Si noti come la frequenza dell’oscillazione forzata sia uguale a quella della forza perturbante indipendentemente dalla frequenza propria del sistema. Lo sfasamento γ dipende invece dalle caratteristiche del sistema oltre che dalla frequenza della forza perturbante (vedi fig. 6).

Il rapporto tra la deformazione massima Y che si ha per effetto dell’oscillazione forzata e la deformazione

che si avrebbe applicando staticamente la forza P0 è detto fattore di risonanza μ (fig. 7)


L’ampiezza massima dell’oscillazione dipende dalla frequenza propria del sistema e dalla frequenza della forza perturbante.
Il rapporto tra l’ampiezza della forza F trasmessa dal sistema alla struttura e la forza perturbante P0 è detto coefficiente relativo di trasmissibilità τr, (fig. 8)

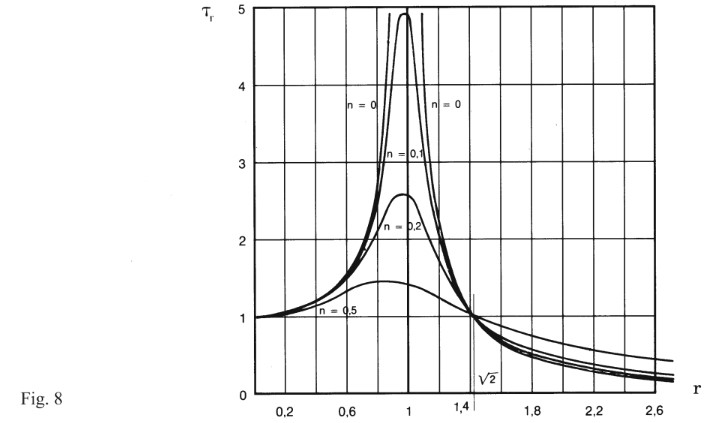
È da mettere bene in evidenza la differenza esistente tra il fattore di risonanza μ e il coefficiente di trasmissione τr.
Il primo definisce l’ampiezza di oscillazione della massa sospesa; il secondo indica l’effetto di isolamento ottenuto.
È evidente dall’andamento dei grafici (figure 7 e 8) che un rapporto r=Ω/ωp elevato è favorevole sia per l’oscillazione della massa sospesa che per un buon isolamento. Si consiglia nelle applicazioni di superare il valore r=2.
Viceversa uno smorzamento elevato limita le oscillazioni della massa sospesa ma provoca un peggioramento nelle condizioni di isolamento.
Per smorzamento nullo μ e τv coincidono.
L’URTO
Si definisce urto un movimento nel quale vi sia una repentina variazione di velocità.
Impulso d’urto è una perturbazione caratterizzata da un’impennata e successivo decadimento dell’accelerazione in un periodo di tempo molto breve.
L’impulso d’urto è normalmente definito dall’ampiezza di picco A0 in g, dalla durata τ0 in millesecondi e dalla forma della curva tempo-accelerazione (vedi figura 9).

Note le caratteristiche dell’urto si risale all’accelerazione G e allo spostamento Y0 cui è sottoposto il sistema elastico mediante le formule:

dove
- f0 è la frequenza propria del sistema in Hz e V in m/sec misura l’energia d’urto.
- V si ricava integrando rispetto al tempo la funzione accelerazione dell’impulso d’urto.
In mancanza di indicazioni più precise sulla forma della curva tempo-accelerazione si può assumere:

dove
- A0= valore di picco dell’accelerazione in g;
- τ0= durata dell’impulso in secondi.
Si noti come una frequenza bassa diminuisca l’entità della forza trasmessa, aumentando però la deflessione.
Le considerazioni precedenti valgono per caratteristiche elastiche (carichi-cedimenti) lineari.
Si noti che per la gomma tale linearità non è verificata ed inoltre si ha un altro fenomeno che infirma i risultati, e cioè l’irrigidimento dinamico.
Nel caso della gomma, i calcoli sono quindi da considerarsi in difetto.